| В статье рассматриваются особенности применения ОС РВ QNX для реализации вычислительной среды системы управления автономных подводных роботов.
1. Что такое АПР?
Общепризнанно, что наиболее безопасным и эффективным путем исследования глубин Океана является использование технических средств, обеспечивающих косвенное присутствие человека под водой. Важную роль в этом играют автономные подводные роботы (АПР). С помощью АПР в настоящее время выполняются обзорно-поисковые и обследовательские работы на больших глубинах и в условиях сложного рельефа дна, подлёдные работы, прокладка оптических кабелей, обследование водозаполненных тоннелей и многие другие. Выполнение этих работ с помощью других средств крайне затруднительно или просто невозможно.
АПР представляет собой автоматический самоходный носитель исследовательской аппаратуры, способный погружаться в заданный район Океана на предельные глубины, двигаться по заданной траектории, выполнять требуемые работы и по окончанию программы возвращаться на обеспечивающее судно или береговую базу. В качестве исследовательской аппаратуры на аппарате обычно устанавливаются измерители параметров среды, фото-видеоаппаратура, обзорные гидролокаторы, геофизическая аппаратура (магнитометр, акустический профилограф, гравиметр).
Основным режимом работы АПР является движение на небольшом отстоянии от дна (от 1.5 до 10 метров) с выполнением необходимых измерений. Система управления (СУ) в совокупности с эхолокационной системой обеспечивает движение в достаточно сложном рельефе (например, на склонах гайотов) со средним уклоном 40-50 градусов.
АПР работает под водой автономно, без связующего кабеля. Время непрерывной работы аппарата под водой зависит от проекта, типа его энергоисточника и может составлять от единиц до нескольких десятков часов и даже суток.
В настоящее время в АПР размещаются достаточно мощные вычислительные системы. В круг задач, решение которых потенциально возможно с помощью АПР, вошли обследовательские работы, инспекция протяженных объектов (подводных трубопроводов, кабелей), мониторинг Океана. Примеры использования аппаратов для обследования находящихся на большой глубине объектов можно найти на странице http://www.imtp.febras.ru/anpa/anpa.html.
2. Особенности вычислительной системы АПР
Традиционно автономные подводные роботы ИПМТ ДВО РАН проектируются для работы на максимальных глубинах, что находит отражение в их механической конструкции. Бортовая электроника размещена в прочных контейнерах диаметром около полутора десятков сантиметров, электрически связанных между собой. Это обстоятельство серьезно ограничивает размеры конструктивов для размещения бортовых процессоров и контроллеров. В зависимости от назначения и размеров АПР состав СУ может меняться и содержать от одного до несколько процессоров, объединенных в локальную вычислительную сеть (ЛВС). Для передачи большого количества информации во время работы используется бортовая сеть Ethernet, а для связи с бортовыми специализированными контроллерами - последовательный канал обмена RS-485.
ЛВС АПР строится, как правило, из готовых процессорных модулей индустриального назначения. В качестве базовой в настоящее время выбрана архитектура х86 (в первую очередь из-за относительной дешевизны и распространенности процессоров), а в качестве изготовителей - фирмы WinSystems и Octagon. Выбор объясняется небольшими размерами конструктивов процессорных модулей данных фирм.
3. Используемая операционная система
Особенности СУ АПР связанны с характером размещения и мощностью процессоров, условиями их функционирования, а также с решаемыми задачами. После проведения анализа среди массы современных ОС РВ в качестве базовой системы была выбрана QNX. При выборе операционной системы для ЛВС АПР принимались во внимание множество факторов. Некоторые из них приведены ниже.
Минимальные требования OC к вычислительным ресурсам. Одно из основных требований к ЛВС АПР - минимальный уровень используемых вычислительных ресурсов. Данное требование имеет под собой следующие основания:
1) необходимость рассеяния тепла в замкнутом объеме при отсутствии конвекции не позволяет использовать мощные процессоры;
2) для того чтобы увеличить максимальную продолжительность запуска АПР требуется минимизировать энергозатраты, в том числе за счет меньшего потребления СУ (это требование особенно важно для аппаратов с малой емкостью энергисточника);
3) косвенной экономии электроэнергии можно добиться за счет выбора меньших габаритов прочных контейнеров для размещения процессоров, что влечет за собой уменьшение затрат на движение, и, следовательно, увеличение автономности АПР;
4) маломощные микрокомпьютеры имеют существенно меньшую стоимость.
Следствие пунктов 1-4:
5) сравнительно небольшой размер оперативной памяти таких микрокомпьютеров (единицы мегабайт);
6) их невысокая производительность.
Обладая быстродействующим микроядром ОС QNX полностью удовлетворяет этим требованиям.
Поддержка распределенных вычислений. В зависимости от назначения АПР система управления может выполняться на ЛВС различной конфигурации. Требуется обеспечить простоту взаимодействия подзадач, выполняющихся на различных процессорах. Кроме того, при смене оборудования отдельные устройства могут переключаться с одного процессора на другой, что должно гибко отслеживаться системой управления. QNX, благодаря встроенному механизму IPC, обеспечивает "прозрачное" взаимодействие процессов, динамически размещаемых на различных узлах сети.
Поддержка модифицируемости ЛВС. СУ АПР должна легко наращиваться и модифицироваться по мере добавления к аппарату новых сенсоров или появления новых задач. QNX полностью удовлетворяет этому требованию (см. предыдущий пункт).
Поддержка механизма приоритетов и системных таймеров. Время работы модулей СУ характеризуется различными интервалами времени. Время работы алгоритмов управления нижнего уровня (например, управление движением) измеряется десятками миллисекунд, и каждый цикл управления должен быть чётко привязан к временным меткам. В то же время рабочий цикл более высоких уровней управления может занимать секунды, и даже минуты. Эти уровни не требуют столь точной привязки ко времени и являются фоном для задач нижнего уровня. Кроме того, немаловажное значение имеет такой параметр как время переключения контекста задач (желательно минимальное). QNX обеспечивает поддержку 32 приоритетов задач, а время переключения контекста минимально среди всех известных ОС РВ.
Надежность и предсказуемость системы. Поскольку АПР функционирует автономно и вмешательство оператора во время выполнения задания невозможно, то надежность системы имеет определяющее значение. По опыту нашей работы с другими операционными системами QNX обладает этими свойствами в наибольшей мере.
Простота реализации и широта использования. СУ должна допускать реализацию существующими средствами программирования на доступных в АПР вычислительных ресурсах. Поставляемая с QNX среда разработки обеспечивает реализацию любой управляющей системы реального времени. Имеется опыт реализации СУ АПР на единственном процессоре i386 с 4 Мб ОЗУ. При этом полностью поддерживается все возможности QNX, включая графический интерфейс оператора.
Первоначально в разработках ИПМТ ДВО РАН использовалась ОС QNX 4.11, а в настоящее время - QNX 4.25E. В качестве средств разработки выступают Watcom C 10.6 и Application Builder 1.14. Графические оболочки: первоначально QNX Windows, которая затем была заменена на Photon.
4. Особенности использования QNX в различных типах АПР
ОС QNX с успехом применяется в различных типах АПР. Ниже приводятся особенности этого использования.
4.1. АПР МТ-98 (прототип)
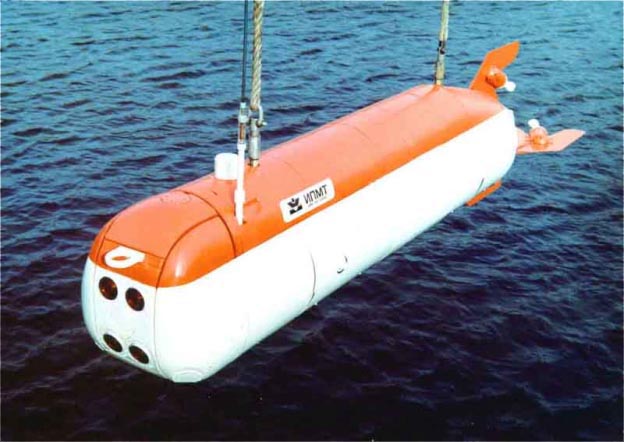
Аппарат предназначен для работы на глубинах до 6000 м и ориентирован на использование в сложном рельефе (рис. 1). Аппараты имеет движительную установку, обеспечивающую произвольные режимы движения (в том числе, движение боком, зависание и т.п.). Для обеспечения движения вблизи препятствий используется многоканальная эхолокационная система, позволяющая различать препятствия впереди по ходу движения, а также двигаться в диапазоне высот от 0.8 до 50 м.
Рис. 1. АПР МТ-98 (прототип)
Для слежения за работой АПР под водой используется гидроакустическая навигационная система. Кроме того, эта же система позволяет осуществлять супервизорный контроль работы АПР (коррекцию выполняемой миссии). На поверхности для связи с аппаратом применяется радиомодем. С его помощью имеется возможность получить по радиоканалу ключевые наборы данных для анализа, загрузить новую миссию, управлять перемещением аппарата по поверхности воды. Источником питания являются аккумуляторы, обеспечивающие около 20 часов эффективной работы у дна. Вес аппарата составляет примерно 1000 кг и зависит от оснащения дополнительной аппаратурой.
Система управления состоит из нескольких компьютеров Octagon 5066, выполняющих различные функции и объединенных в локальную вычислительную сеть посредством канала Ethernet. Работа этой сети организуется с использованием ОС QNX. К этой же сети подключается компьютер оператора, когда АПР находится на борту судна (рис. 2). Компьютеры связаны между собой стандартным FLEET-протоколом, что обеспечивает скорость и надежность передачи данных. Распределенная структура СУ предполагает следующее разделение функций между компьютерами ЛВС. Автопилот и системный контроллер составляют основу системы управления и обеспечивают выполнение введенного задания, координацию работы бортовой аппаратуры и контрольно-аварийные функции. Процессор обработки изображений служит для выделения объектов и прецизионной навигации.
Рис. 2. ЛВС АПР МТ-98.
Характерной особенностью ЛВС МТ-98 является наличие наряду со скоростным каналом Ethernet-TP нескольких последовательных каналов обмена RS-485. На последовательных каналах размещается бортовое оборудование, оснащенное микроконтроллерами. Последние обеспечивают функции предварительной обработки данных и самодиагностики, поэтому информационный обмен с ними сведен к минимуму. Оборудование группируется вокруг каналов таким образом, чтобы выход из строя одного из них не приводил к потере работоспособности всего аппарата.
4.2. Солнечный АПР
Солнечный автономный необитаемый подводный аппарат (САНПА) предназначен для проведения длительных многосуточных океанографических измерений в океане. В процессе выполнения программы-задания аппарат периодически всплывает на поверхность для осуществления связи с оператором посредством спутниковой системы связи Oceanographic Data Link (ODL) и сети Интернет для передачи накопленных данных и возможной модификации программы-задания. В ночное время аппарат выполняет активную часть программы-задания, а в светлое время он всплывает на поверхность для зарядки аккумуляторов от расположенных на нем солнечных панелей (рис. 3). Находясь на поверхности, аппарат определяет свои координаты с помощью GPS. Суточный пробег аппарата в средних широтах составляет 20 - 40 км и зависит от солнечного излучения. Предельная рабочая глубина погружения САНПА равна 1000 метрам, и время непрерывной работы не ограничено.

Рис. 3. Солнечный АПР во время подзарядки на поверхности.
Система управления включает экономичный PC-совместимый промышленный компьютер Epson CARD 486-HB и набор микроконтроллеров, связанных между собой сетью на основе последовательного канала обмена RS-485.
Бортовой компьютер выполняет функции верхнего уровня системы управления. Он также обеспечивает расчет местоположения САНПА на основе GPS и датчиков бортовой системы счисления, выполняет сохранение собранной сенсорными системами аппарата информации, осуществляет информационный обмен с компьютером оператора и бортовыми микроконтроллерами. Компьютер функционирует на основе ОС QNX.
Связь бортового компьютера с компьютером оператора осуществляется с помощью радиомодема или акустического модема. При этом компьютер аппарата является удаленным узлом сети QNX. Система автоматически выбирает наиболее скоростной канал из доступных в данный момент для связи с АПР.
Набор микроконтроллеров реализует систему управления нижнего уровня. Данная система включает систему зарядки аккумуляторов от солнечных панелей, систему энергообеспечения, блок управления маршевым движителем и двигателями рулей высоты.
САНПА проходил испытания в заливе Петра Великого летом и осенью 2000 и 2001 годов. Во время испытаний были выполнены несколько миссий продолжительностью от 3 до 5 суток. Проблем с функционированием системы управления не возникало. 4.3. Автономно-привязной аппарат TSL
Подводный аппарат TSL (рис. 4) проектировался для выполнения обзорно-поисковых работ на шельфе на глубине до 200 метров, визуального обследования подводной части причальных сооружений, донных конструкций или затонувших объектов, протяженных водозаполненных тоннелей или емкостей, а также для инспектирования подводных трубопроводов.

Рис. 4. Автономно-привязной аппарат TSL перед погружением
Аппарат имеет на борту аккумуляторы и энергетически автономен. Особенностью аппарата является его способность функционировать как в автономном, так и в супервизорном режиме. В последнем случае оператор имеет возможность управлять аппаратом и наблюдать телевизионное изображение от видеокамеры, располагающейся на аппарате, в реальном времени. Связь между компьютером оператора и вычислительной системой ПА TSL в этом случае осуществляется через оптоволоконный кабель (поддерживается канал обмена RS232). Кабель располагается на специальной катушке в корме аппарата и по мере движения свободно выматывается (максимальная длина кабеля до 5 км.).
Управление аппаратом осуществляется командами высокого уровня, поступающими с пульта оператора. Следует отметить, что набор этих команд стандартизован и используется также в СУ автономных аппаратов (САНПА и МТ-98). В автономном режиме работы TSL волоконно-оптическая связь отсутствует, а источником команд является загруженная в Автопилот программа-задание.
Рис. 5. Структура подводного аппарата TSL.
Система управления TSL является распределенной и включает бортовую систему управления на основе автопилота и пульт управления оператора. Компьютер оператора и бортовые компьютеры объединены в сеть на базе ОС QNX (рис. 5). Обмен данными между процессами производится с использованием встроенного механизма обмена сообщениями QNX.

Рис. 6. Интерфейс оператора ПА TSL.
Ввод управляющей информации осуществляется оператором посредством разработанного для этих целей интерфейса пользователя с помощью клавиатуры, мыши или джойстика. В основном окне данного интерфейса выводятся данные измерений пилотажных датчиков, осуществляется ввод целевых значений параметров движения подводного аппарата /ПА/, а также производится переключение режимов работы бортового оборудования. Результаты измерений отображаются в цифровом виде, а также в виде шкал и стрелочных указателей. Программа работает в графической оболочке Photon 1.14, и была разработана с помощью Photon Application Builder 1.14. На рис. 6. в качестве примера показано несколько окон интерфейса пользователя подводного аппарата TSL.
TSL прошел первые морские испытания в 1994 году. В 1998 году он был модернизирован. В 1999 году TSL использовался для отладки системы автоматического отслеживания протяженных объектов на основе обработки визуальной информации.
Заключение
ОС QNX используется в ИПМТ ДВО РАН с 1994 года. Применение ОС QNX позволяет строить надежные и компактные системы. Достаточно сказать, что за время использования этой системы в качестве базы для функционирования СУ АПР не было отмечено ни одного сбоя по вине QNX. Система допускает размещение как в миниатюрных, так и в больших глубоководных АПР. Дальнейшие разработки в Институте планируется вести с использованием QNX RTP.
Об авторах
Ваулин Юрий Валентинович, старший научный сотрудник лаборатории систем навигации и обработки сенсорной информации.
Инзарцев Александр Вячеславович, заведующий лабораторией систем управления.
Институт проблем морских технологий ДВО РАН, Владивосток
|