Аннотация
Статья посвящена системе технического диагностирования и мониторинга устройств железнодорожной автоматики и телемеханики АПК-ДК (СТДМ). Рассмотрено назначение системы, ее структура, приведены примеры контролируемых устройств. Наибольшее внимание уделено концентраторам сбора данных системы, работающим под управлением ОСРВ QNX4, их аппаратному и программному обеспечению.
Ключевые слова:
Транспорт. Железные дороги. СЖАТ. СЦБ. АПК-ДК. СТДМ. Диагностика. Мониторинг.
Введение
Железнодорожный транспорт представляет собой сложную, территориально рассредоточенную систему огромного числа технологических подразделений и технических средств. Главная задача железнодорожного транспорта – обеспечение перевозок пассажиров и грузов с максимальной производительностью, с минимальной себестоимостью и гарантированной безопасностью движения.
В целях повышения безопасности в работе железнодорожного транспорта постоянно возрастают требования к техническому обслуживанию устройств автоматики и телемеханики, а также потребность к снижению эксплуатационных расходов в дистанции сигнализации и связи, что приводит к необходимости совершенствования методов и средств технического обслуживания. Благодаря внедренным и широко развивающимся, на российских железных дорогах микропроцессорным системам, расширились возможности для решения поставленных задач.
Система диспетчерского контроля АПК-ДК
Одним из направлений, сопутствующих решению этих задач, была разработка и создание, по заданию ЦШ МПС РФ, системы диспетчерского контроля АПК-ДК (аппаратно-программный комплекс диспетчерского контроля). Ее разработкой занималась кафедра «Автоматика и телемеханика на ж. д.» Петербургского Государственного Университета Путей Сообщения (ПГУПС) в рамках отраслевой программы автоматизации хозяйства сигнализации и связи.
Основными целями для создания АПК-ДК являлись:
- получение своевременной, полной и достоверной информации об устройствах железнодорожной автоматики и телемеханики (СЖАТ) за счет непрерывного контроля за их техническим состоянием;
- повышение надежности работы устройств, за счет своевременного выявления предотказных состояний и профилактики сбоев.
АПК-ДК позволил осуществлять сбор, обработку, хранение и отображение информации о состоянии объектов контроля в реальном масштабе времени.
Данные по состоянию устройств проходят логическую обработку, и могут быть представлены как в текущем времени так в архивном режиме. Основными потребителями получаемой информации является диспетчер ШЧ (ШЧД). Также пользоваться данными могут дорожный диспетчер (ШД), и другие смежные службы.
На начальном этапе развития системы основная нагрузка по контролю за устройствами ЖАТ лежала на диспетчере ШЧ, что не давало больших результатов системы. Поэтому появилась потребность в создании центра, наделенного оперативным штатом для логической обработки и ведения статистики данных, получаемых от структуры систем ТДМ. Создание и внедрение комплекса задач мониторинга системы ТДМ решил эту проблему.
Система технического диагностирования и мониторинга АПК-ДК (СТДМ)
Создание системы ТДМ (АПК-ДК) вывело контроль и обслуживание устройств железнодорожной автоматики и телемеханики на новый уровень развития. Основные цели для ввода данной системы – это непрерывный контроль технического состояния устройств. Под этим понимается процесс проверки соответствия значений параметров устройства установленным требованиям или нормам и определения на основе полученной информации текущего технического состояния объекта контроля (исправное - неисправное, работоспособное - неработоспособное, предотказное состояние).
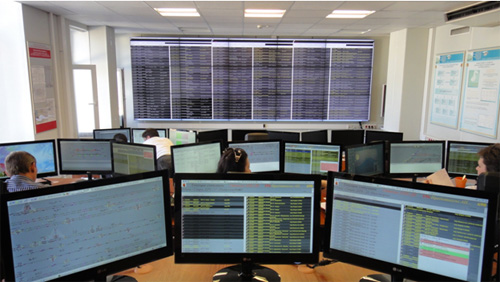
Рисунок 1. Центр Диагностирования и Мониторинга Октябрьской ж.д.
Система технического диагностирования и мониторинга объектов ЖАТ обеспечивает:
- сбор, первичную обработку и передачу информации о процессах на объектах контроля;
- автоматическую регистрацию событий изменения параметров или состояния устройств ЖАТ;
- формирование баз данных (входных и выходных параметров устройств ЖАТ), прогнозирование по результатам обработки полученной информации тенденций и динамики изменения контролируемых параметров;
- графическое отображение участков контроля, динамическое отображение состояния устройств ЖАТ, сообщений о нарушениях нормальной работы устройств ЖАТ, пути, электроснабжения с уровнями детализации;
- локализацию мест нарушения нормальной работы устройств ЖАТ и определение неисправной аппаратуры;
- контроль работоспособности, автоматическое тестирование системы и средств диагностирования, автоматизированную калибровку измерительных подсистем;
- интеграцию с действующими и создаваемыми системами контроля и управления.
Структура системы
Обобщенная структура системы АПК-ДК (СТДМ) представлена на рисунке:
Рисунок 2. Структура системы АПК-ДК (СТДМ)
В системе можно выделить три уровня:
Линейный уровень – уровень инфраструктуры станций и перегонов участка железной дороги. Основная задача линейного уровня – комплексный сбор информации о состоянии объектов контроля в режиме реального времени. В линейный уровень системы входят: различные контроллеры сбора данных, концентраторы линейных пунктов диагностирования, увязки с другими СЖАТ на уровне станций и каналообразующая аппаратура для организации сети передачи данных.
Уровень дистанции – уровень дистанции СЦБ (ШЧ) – линейного предприятия ОАО РЖД, которое занимается содержанием и обслуживанием устройств сигнализации, централизации и блокировки (СЦБ) на станциях и перегонах участка железной дороги. На уровне дистанции располагаются: концентраторы центральных постов диагностирования (ЦПД), Дистанционный сервер диагностики, АРМы оперативного персонала ШЧ. Основная задача уровня ШЧ – прием обработка и хранение информации о состоянии объектов контроля, поступающей от линейного уровня.
Уровень службы – уровень Управления Дороги. Сюда входят – дорожные серверы Мониторинга, АРМы Дорожного Центра Диагностирования и Мониторинга (ЦДМ), серверы увязки с другими системами на дорожном уровне. Основная задача уровня службы – комплексный анализ поступающих данных для решения задач ЦДМ и передаче результатов в вышестоящие системы.
Что контролирует система АПК-ДК (СТДМ)
Далее приведены примеры некоторых СЖАТ, которые контролирует система АПК-ДК (СТДМ):
Системы электрической централизации (ЭЦ). Это системы, которые управляют движением поездов на станции и обеспечивают безопасность движения. В настоящий момент на сети дорог используются как релейные системы ЭЦ, так и микропроцессорные системы централизации (МПЦ). При работе с релейными системами ЭЦ информация о поездном положении и работе самой системы собирается в ЛПД АПК-ДК с помощью специализированных контроллеров дискретного ввода. Контроллеры собирают информацию с реле системы ЭЦ и с пульта–табло дежурного по станции (ДСП) и передают данные в концентратор ЛПД по RS485. При работе с МПЦ информация о поездном положении и работе самой системы МПЦ передаются в ЛПД АПК-ДК по цифровому стыку (RS422, RS485, Ethernet – в зависимости от вида системы). Измерения параметров работы как релейных ЭЦ, так и МПЦ производятся специализированными контроллерами АПК-ДК (СТДМ). Измерительные контроллеры связаны с концентратором ЛПД по RS485.

Рисунок 3. Измерительный контроллер УКТРЦМ на стативе поста ЭЦ.
Системы автоматической блокировки (АБ). Это системы, которые управляют движением и обеспечивают безопасность движения поездов на перегоне. Различают системы АБ с централизованным размещением аппаратуры (АБТЦ) и с распределенным размещением аппаратуры. В случае АБТЦ вся релейная аппаратура размещена в модулях, расположенных на станциях ограничивающих перегон или в середине перегона. На самом перегоне располагаются только светофоры. В случае АБ с распределенным размещением аппаратура системы располагается в релейных шкафах (РШ) вдоль путей перегона. Контроль АБТЦ системой АПК-ДК(СТДМ) осуществляется так же как и контроль релейных систем ЭЦ – ввод дискретных данных через специализированные контроллеры дискретного ввода, измерения – через специализированные измерительные контроллеры. Связь с концентратором – по RS485. При работе с распределенными системами АБ, контроллеры сбора данных располагаются непосредственно в РШ на перегоне. Передача данных в концентратор ЛПД на станции осуществляется по существующим физическим линиям (по меди) на расстояние до 30км.
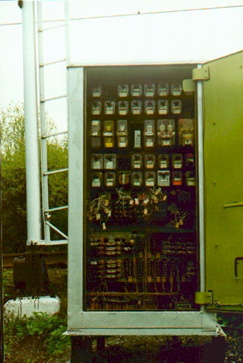
Рисунок 4. Контроллер АКСТ в РШ автоблокировки
Системы автоматической переездной сигнализации (АПС). Это системы обеспечивающие безопасность на переездах и пешеходных дорожках – управление светофорами, и заградительными устройствами. Переезды, расположенные на станции входят в состав ЭЦ и контролируются так же, как и ЭЦ. Переезды и дорожки расположенные на перегоне контролируются также как объекты распределенной АБ.
Питающие установки (ПУ). Это системы обеспечивающие электропитание всех устройств сигнализации централизации и блокировки (СЦБ) на станции и перегоне. Контроль системой АПК-ДК (СТДМ) ПУ включает в себя:
- Измерения напряжений и токов в первичных и вторичных цепях питания,
- Контроль состояния контакторов и автоматов питания (через контроллеры дискретного ввода)
- Контроль качества электроэнергии по ГОСТ с помощью специализированных приборов (связь с приборами по RS485),
- Контроль работы устройств бесперебойного питания (УБП), связь по RS485 или Ethernet.
- Контроль работы шкафов управления дизель-генераторными установками (ШУДГА). Связь по CAN
- Контроль сопротивления изоляции источников питания (связь с приборами по RS485)
Системы пожарной и охранной сигнализации (ПОС). Системами ПОС оснащаются модули АБТЦ и здания ЭЦ станций. Как ПОС также включают в себя систему автоматического пожаротушения. Концентратор ЛПД АПК-ДК подключается к ПОС по RS422 и получает информацию о состоянии датчиков (шлейфов) ПОС и самодиагностику системы.
Аппаратные средства АПК-ДК (СТДМ)
Система АПК-ДК (СТДМ) – достаточно сложный аппаратно-программный комплекс, элементы которого территориально распределены начиная от линейного уровня (постов ЭЦ, модулей АБТЦ и т.д.) и заканчивая уровнями Управлений Дорог и Департаментом ОАО РЖД. На каждом уровне используются свои аппаратные и программные средства. Рассмотреть все элементы системы в рамках одной статьи достаточно сложно. Поэтому далее подробно рассматривается ключевой элемент линейного уровня системы – концентратор линейного пункта диагностирования (ЛПД) и построенное на его базе автоматизированное рабочее место электромеханика (АРМ ШН).
Аппаратные средства концентраторов ЛПД. Концентраторы линейных пунктов диагностирования (ЛПД) построены на базе аппаратных средств Advantech. В качестве шасси используются корпуса IPC610 различных модификаций. Это удобное и надежное шасси хорошо зарекомендовало себя в ходе эксплуатации системы. В корпусе располагается пассивная объединительная плата (backplane) со слотами ISA и PCI. В настоящий момент в качестве основной используется PCA-6114P7 с 6 ISA и 7 PCI слотами. В более ранних модификациях использовались backplane только с ISA слотами. В backplane установлена процессорная плата (одноплатный компьютер) стандарта PICMG 1.0. На протяжении развития системы использовались процессорные платы Advantech PCA-6168 и PCA-6178, на настоящий момент основная плата - PCA-6010. Из достоинств плат можно выделить их надежность, наличие встроенных средств диагностики и самовосстановления (WDT), их поддержку в ОСРВ QNX4. Из недостатков, в частности PCA6010 – не полную поддержку шины ISA (нет поддержки DMA).

Рисунок 5. Концентратор IPC610 в шкафу ЛПД. Пост ЭЦ ст.Гатчина Варшавская.
Для организации взаимодействия с контроллерами сбора данных, с другими микропроцессорными системами железнодорожной автоматики и телемеханики (СЖАТ) и связевой каналообразующей аппаратурой концентратор должен иметь достаточное количество интерфейсных портов. В настоящее время в системе используются последовательные интерфейсы семейства RS (RS232, RS485, RS422, “токовая петля”), Ethernet и CAN. Для формирования дополнительных портов концентратор оснащается платами расширения стандарта ISA или PCI.
Для создания дополнительных Ethernet портов на концентраторе используются сетевые платы стандарта PCI. Выбор производителя плат определялся поддержкой кристалла в QNX4. Наибольшее распространение в системе получили сетевые платы RTL (сетевой драйвер Net.rtl) и сетевые платы 3Com (сетевой драйвер Net.ether905)
Для оснащения концентратора дополнительными последовательными портами используются как мультипортовые платы стандарта ISA, так и стандарта PCI. Из ISA плат применяются платы Advantech PCL745 (2 порта RS485 / RS422), PCL846 (4 порта RS485 / RS422), PCL741 (2 порта RS232 / “токовая петля”). К недостаткам ISA плат можно отнести необходимость аппаратного задания настроек порта (адрес ввода-вывода и прерывания, тип стыка), что может приводить к ошибкам. Также в системе используются мультипортовые платы стандарта PCI PCI1611 (4 порта RS485 / RS422). Настройка вида интерфейса портов платы производится программно. Для реализации указанной настройки был разработан свой менеджер ресурсов Dev.ser, который позволяет работать со всеми типами мультипортовых плат, применяемых в системе. В менеджере также реализована возможность подслушивания трафика, идущего через последовательный порт, без влияния на работу передачи данных по порту. Все используемые мультипортовые платы имеют опторазвязанные порты. Это позволяет повысить надежность системы и упростить процесс пуско-наладочных работ и сервисного обслуживания.
Для добавления на концентратор CAN портов используются платы PCL841 (ISA) и PCI1680 (PCI). Для работы с CAN портами в QNX4 был разработан менеджер устройств Dev.can с поддержкой стандартов CAN-2.0A CAN-2.0B
Концентратор ЛПД располагается в помещении поста ЭЦ или модуля АБТЦ в 19” шкафу. Вместе с концентратором в шкафу располагаются устройства бесперебойного питания, связевая аппаратура, измерительные контроллеры и клеммные панели.
Программное обеспечение концентраторов ЛПД и ЦПД
Операционная система. Программное обеспечение концентраторов АПК-ДК (СТДМ) функционирует под управлением многозадачной операционной системы жесткого реального времени QNX4. Выбор ОСРВ QNX4 был сделан на этапе построения первых вариантов системы в конце 90-х годов. На тот момент использовалась версия QNX4.23, которую впоследствии заменила версия 4.25. В качестве аргументов в пользу QNX выступали простота работы с аппаратными средствами, хорошее документирование ОС, лицензионная и патентная чистота ОС. ОС достаточно легко осваивается программистами, имеющими опыт работы под DOS или Linux.
Немаловажным аргументом при выборе ОС стала удобная и оперативная техническая поддержка со стороны официального дистрибьютора QNX Software Systems Ltd компании SWD Software, а также возможность обучения разработчиков эффективной работе с ОСРВ QNX. Сотрудники нашей компании с 2000г принимают участие в конференциях “QNX Россия”, что позволяет быть в курсе последних событий из мира ОСРВ QNX. Конечно, после переноса места проведения конференции в Москву, посещать ее стало менее удобно. Но введенная практика проведения ежегодных “Дней технологий QNX” в Санкт-Петербурге во многом решило эту проблему.
Программное обеспечение построено по модульному принципу, с разделением функций между отдельными процессами. Взаимодействие между модулями организовано на базе стандартных механизмов POSIX. В программном обеспечении широко используются механизмы IPC QNX (сообщения, прокси, сигналы), используется многопотоковая обработка (в рамках ограничений QNX4 на работу с потоками). Задачи на различных узлах взаимодействуют по FLEET, также реализован альтернативный вариант связи концентраторов по TCP/IP.
Передача данных серверам верхнего уровня системы, а также связь с некоторыми МП СЖАТ осуществляется с использованием IP протоколов (TCP и UDP).
Для администрирования и технической поддержки системы используется удаленный доступ с использованием Phindows и JumpGate.
Структура и назначение ПО. С точки зрения решаемых задач модули можно разделить на следующие группы:
- Программы съема и передачи информации обеспечивают ввод в систему информации о состоянии объектов контроля.
- Серверы передачи данных обеспечивают маршрутизацию данных между процессами внутри концентратора.
- Программы ведения архивов обеспечивают ведение архивов собираемой информации на концентраторе.
- Программы передачи данных по сетям обеспечивают передачу собираемой информации между концентраторами, и на серверы верхнего уровня.
- Программы графического интерфейса служат для организации интерфейса пользователя на концентраторе.
- Вспомогательные и сервисные программы используются для диагностики работы системы при проведении пусконаладочных работ.
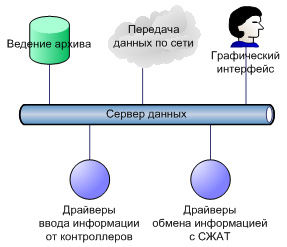
Рисунок 6. Обобщенная структура прикладного ПО концентратора
Модульное построение ПО позволяет использовать для каждой конкретной конфигурации целевой машины (концентратора) только те модули, которые необходимы для его работы. Тем самым достигается оптимальное использование вычислительных ресурсов концентратора. Кроме того достигается возможность добавления новых программных модулей для расширения функциональных возможностей системы без изменения уже существующих программ.
Организация информационного взаимодействия с внешними устройствами и системами
Среди программ, обеспечивающие взаимодействия с внешними устройствами (драйверов), можно выделить следующие группы:
- Драйверы ввода информации от контроллеров собственной разработки.
- Драйверы ввода информации от контролеров сторонних разработчиков.
- Драйверы организации информационного обмена с другими микропроцессорными системами железнодорожной автоматики и телемеханики (МП СЖАТ).
При взаимодействии с контроллерами направление передачи данных одностороннее – от контроллера к концентратору. Состав и объем передаваемой информации определяется типом контроллера.
При взаимодействии с МП СЖАТ передача данных может быть как односторонней, так и двухсторонней. Причем, в МП СЖАТ могут передаваться данные, как собранные контроллерами, так и полученные от других МП СЖАТ. Таким образом, концентратор ЛП может выступать мостом при передаче данных между двумя МП СЖАТ.
В качестве физического уровня передачи данных используются интерфейсы RS485, RS422, RS232, “Токовая петля”, CAN, Ethernet. В качестве канального (транспортного) уровня передачи данных используются стандартные протоколы ModBUS, ADAM4000, CAN 2.0, TCP, UDP, а также специализированные протоколы.
В рамках принятой архитектуры построения ПО в АПК-ДК (СТДМ) может быть реализован информационный обмен практически с любой системой (прибором) имеющей в своем составе цифровой стык промышленного стандарта. Причем могут быть использованы как протоколы, разработанные в АПК-ДК (СТДМ), так и протоколы, реализованные в подключаемой системе.
Программное обеспечение АРМ ШН (электромеханика СЦБ)
АРМ ШН АПК-ДК (СТДМ) может быть реализован как в виде отдельного компьютера, так и непосредственно на концентраторе ЛПД АПК-ДК (СТДМ). АРМ реализован в виде многооконного интерфейса с использованием GUI Photon..
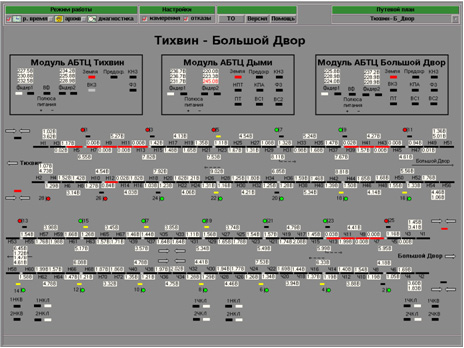
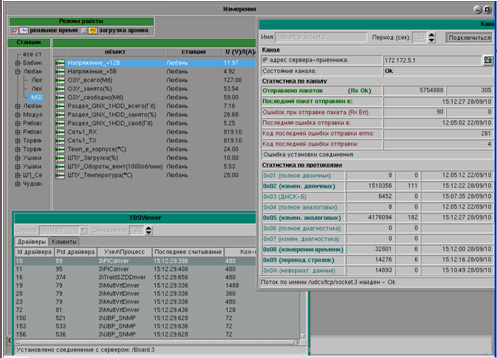
Рисунок 7. Окно поездного положения АРМ ШН
Среди задач, решаемых АРМ ШН можно выделить:
- Обеспечение пользователей АРМ (СТДМ) (электромехаников, старших электромехаников) полной и достоверной информацией о состоянии объектов контроля на станциях и перегонах в режиме реального времени.
- Возможность просмотра архива всей собираемой информации за период хранения архива (по умолчанию составляет 30 суток)
- Обеспечение пользователя диагностической информацией о состоянии устройств съема данных АПК-ДК (СТДМ), информационных стыковок с другими МП СЖАТ и работе системы передачи данных АПК-ДК.
- Предоставление пользователю АРМ инструментов для использования автоматизированной технологии обслуживания устройств СЦБ на станциях и перегонах. В рамках этой задачи пользователь получает возможность формировать протоколы автоматизированных измерений, выводить их на печать и сохранять их в архиве АРМ ШН для дальнейшего использования.
Расширение списка автоматизированных с помощью АРМ ШН работ идет за счет применения в системе новых измерительных контроллеров, а также использования ручного ввода результатов измерения для работ, которые в настоящий момент не могут быть автоматизированы.
Средства самодиагностики системы. Особое внимание уделено самодиагностике работы системы. Функции самодиагностики позволяют существенно повысить надежность и качество работы системы, а также упростить ее обслуживание. Основные направления самодиагностики АПК-ДК (СТДМ):
Внедрение системы
По состоянию на начало 2011 года система АПК-ДК (СТДМ) внедрена на 15 дорогах сети ОАО “РЖД”. Число контролируемых станций - более 1000 шт. Система продолжает активно внедряться на новых участках и модернизироваться на уже пущенных объектах.
Среди наиболее масштабных внедрений системы можно выделить:
- Контроль участков высокоскоростного движения на участках Москва – Санкт-Петербург (Сапсан, Октябрьская ж.д.), Санкт-Петербург – Бусловская (Аллегро, Октябрьская ж.д.), Москва – Нижний Новгород (Сапсан, Московская и Горьковская ж.д.)
- Контроль грузового хода Октябрьской ж.д. (Бабаево – Мга – Гатчина – Усть Луга)
- Контроль участка Тайшет – Иркутск (Транссиб, Восточно-Сибирская ж.д.)
- Контроль участков движения Аэроэкспрессов к аэропортам Москвы
Санкт-Петербург
ООО “Компьютерные Информационные Технологии”
Главный инженер Иванов А.А.
Начальник отдела Григорьев С.Н.
mail: [email protected]
|