 |
 |
Структура автоматизации диспетчерского управления перевозками за последние 20 лет неоднократно претерпевала изменения по мере развития технической базы, методов управления и моделей перевозочного процесса на различных уровнях.
Высокий уровень требований к эффективности диспетчерского управления перевозками ставит задачи совершенствования и развития ранее созданных систем автоматики и телемеханики, обеспечивающих достижение единого информационного пространства в масштабе всех систем управления перевозками ОАО «РЖД».
Разработанная в научно-исследовательской лаборатории «Системы диспетчерского контроля и управления» (НИЛ СДКУ) и принятая к тиражированию на сети железных дорог РФ система диспетчерской централизации с распределенными контролируемыми пунктами «ДЦ-ЮГ с РКП» является примером внедрения современных технологий автоматизации на российских железных дорогах.
Основа системы – полное резервирование всех компонентов технических средств рабочего места дежурного по станции, дежурного электромеханика, станционных локальных сетей, центральных блоков РКП-Ц, модулей сопряжения с исполнительными устройствами. Реализация локальной сети РКП на базе стандартов CAN обеспечивает работу в режиме жесткого реального времени и высокую устойчивость к помехам; бесконфликтный аппаратный арбитраж доступа к сети без потери пропускной способности; надежный контроль ошибок передачи и приема данных. Использование одной из основных в мировой практике операционной системы реального времени QNX способствует достижению требуемого уровня информационной безопасности.
Структура АСУ перевозочным процессом
К настоящему времени к числу относительно самостоятельных элементов структуры АСУ перевозочным процессом относятся:
- сеть диспетчерских центров управления перевозками (ЦУП);
- комплексы информационно-управляющих, интегрированных и информационно-справочных дорожно-сетевых АСУ;
- АСУ управления технологическими процессами линейных подразделений;
- системы автоматического съема информации о перемещении подвижных единиц с устройств СЦБ (Сигнализация, Централизация, Блокировка) станций и перегонов;
- системы автоматической идентификации подвижного состава;
- прикладные комплексы задач, реализующие сквозные информационно-управляющие технологии на АРМ (Автоматизированное Рабочее Место) оперативно-диспетчерского персонала и других работников сетевого ЦУП и дорожных центров управления перевозками ДЦУ.
Центры управления перевозками ОАО «РЖД» и железных дорог являются важнейшим элементом автоматизированной системы управления перевозками грузов и пассажиров и призваны повысить качество оперативно-диспетчерского руководства перевозочным процессом на сети российских железных дорог.
Управление перевозочным процессом строится по принципу сквозных информационно-управляющих технологий, направленных от ЦУП ОАО «РЖД» через ДЦУ до рабочих мест линейных подразделений, выполняющих те или иные операции перевозочного процесса.
Сквозные информационно-управляющие и аналитические технологии должны обеспечить единство управления перевозочным процессом на всех уровнях с соблюдением условий заказа на перевозки и минимизацией эксплуатационных затрат на их выполнение.
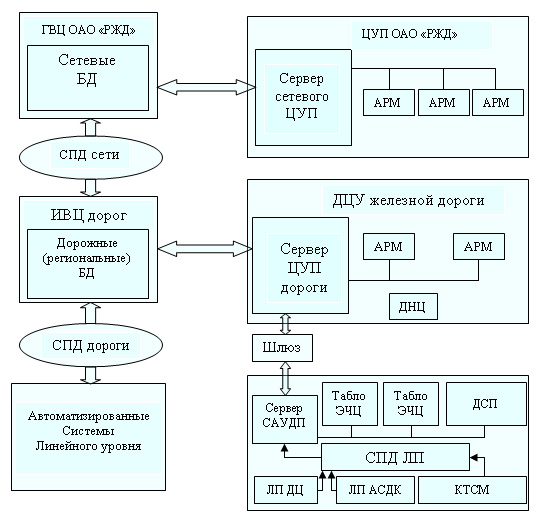
Рис. 1. Структурная схема организации перевозочного процесса
Центральными звеньями трехуровневой структуры являются построенные по единому принципу серверы сетевого и дорожных центров управления, на которых реализуются комплексные оперативные модели перевозочного процесса и решаются прикладные задачи управления перевозками для оперативно-диспетчерского персонала, руководства ОАО «РЖД», железных дорог и других пользователей.
Основной поток информации об операциях с объектами перевозочного процесса формируется в автоматизированных системах линейного уровня через сетевой и дорожные информационно-вычислительные центры.
Информация о продвижении поездов в масштабе реального времени генерируется в системах автоматизированного управления движением поездов (САУДП) на участках и в узлах путем съема сигналов линейными пунктами систем ДЦ или ДК с объектов контроля. Далее, через серверы САУДП и ДЦУ дороги, информация поступает в дорожные и сетевой вычислительные центры. Первичное соединение этой информации с данными о характеристиках поезда (индекс, вес, длина, повагонный состав и т.п.) происходит на уровне ДЦУ в АРМах ДГЦ, ДГЦУ участков и узлов.
Ниже, в контексте кратко рассмотренной трехуровневой структуры сети ЦУПов, показаны роль и место систем ДЦ, функционирующих на линейном и дорожном уровнях управления перевозками.
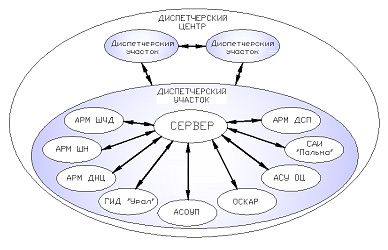
Рис. 2. Структура взаимодействия «ДЦ-ЮГ с РКП» с сетевыми информационными
системами и АРМми
Данная структура наглядно показывает, что сервер «ДЦ-ЮГ с РКП» взаимодействует с информационными системами САИ «Пальма», ОСКАР, АСОУП, ГИД «Урал» и др. Роль «ДЦ-ЮГ с РКП» состоит в обеспечении перечисленных систем первичной информацией о фактическом состоянии перевозочного процесса на станциях и перегонах диспетчерских участков.
Структура «ДЦ-ЮГ с РКП»
Структура «ДЦ-ЮГ с РКП» построена по иерархическому принципу при обеспечении возможности использования системы на полигонах железных дорог любой конфигурации (линейной, радиальной, сетевой и их сочетаний).
Агрегатный принцип построения системы на базе РКП обеспечивает высокую унификацию, технологичность в серийном производстве, простоту изменений объема выполняемых функций и конфигураций. Функциональная и структурная децентрализация системы на основе локальной сетевой архитектуры РКП обеспечивает ее высокую надежность.
Объединение подсистем верхнего и нижнего уровней основано на использовании ЛС, позволяющих обеспечить:
- возможность объединения (разъединения) диспетчерских кругов;
- организацию удаленных АРМов в режиме реального времени;
- создание единого информационного пространства, в том числе при объединении ЛС различного типа на основе современных операционных систем.
На уровне РКП система согласовывается со станционными и перегонными устройствами, а также средствами обеспечения безопасности.
Основные задачи, решаемые ДЦ-ЮГ с РКП:
- непрерывный контроль поездной ситуации на участке в автоматическом режиме;
- автоматическое ведение и анализ ГИД (График Исполненного Движения), документирование, создание приложений и расчетов основных показателей;
- расчет и отображение нормативного, прогнозного и исполненного графиков;
- передача команд на РКП;
- трансляция, индикация и корректировка номеров поездов;
- прием, анализ и отображение данных об объектах ТС (Телесигнализация);
- предоставление оперативной и нормативно-справочной информации оперативному персоналу;
- протоколирование сообщений, контроль работоспособности РКП, регистрация и локализация отказов аппаратуры;
- прием управляющих команд ДНЦ (Поездной Диспетчер), их анализ и передача на РКП;
- телемеханический контроль состояния технологических объектов (РЦ, стрелок, сигналов, переездов, устройств обнаружения перегретых букс и т.д.);
- ведение динамической поездной модели, контроль поездного положения на участке, подвижных единиц на участке с учетом номеров и индексов поездов;
- ведение БД по поездам;
- регистрация «окон», предупреждений и приказов диспетчера;
- связь с АСОУП и информационными системами верхнего уровня ЦУП дороги.
Функции РКП:
- прием, анализ и реализация команд ТУ (Телеуправление);
- программное выполнение логики маршрутного набора;
- передача на ЦПУ данных о состоянии объектов контроля в спорадическом, циклическом режимах или по запросу;
- диагностирование аппаратных средств и передача результатов на ЦПУ;
- контроль технического состояния устройств СЦБ.
ОСРВ QNX в системе «ДЦ-ЮГ с РКП»
Режим реального времени – это весьма существенное ограничение в свободе выбора алгоритмов функционирования «ДЦ-ЮГ с РКП» и их программной реализации. Условия эксплуатации системы в таком режиме предопределяют выбор соответствующей операционной системы.
Быстродействие и реакцию ДЦ возможно достичь за счет распараллеливания задач сбора, обработки, преобразования информации и измерения параметров устройств СЦБ, а также использования высокоскоростных каналов связи, обеспечивающих минимальное время передачи и приема оперативной информации.
Цикл «опроса» объектов контроля составляет не более 5 секунд, а передача одной команды – не более 0,5 секунд и, принимая во внимание реальный режим диспетчерского управления и временные ограничения на реализацию алгоритмов ТУ-ТС, ключевым вопросом является выбор встраиваемой платформенной операционной системы жесткого реального времени (ОСРВ).
Выбор QNX в качестве основы для реализации функций ДЦ был сделан в далеком 1994 году. На тот момент использовалась версия QNX4.23, которую впоследствии заменила версия 4.25. Аргументами в пользу выбора ОСРВ QNX выступили простота работы с аппаратными средствами, микроядерная архитектура, возможность работы с различными типами файловых систем, встроенная графическая подсистема Photon, а также качественная техническая поддержка предоставляемая компанией SWD Software.
Внедрение системы ДЦ-ЮГ с РКП:
На сегодняшний день список железнодорожных систем, использующих QNX, включает в себя: ДЦ ТРАКТ, АПК ДК, «ДЦ-ЮГ с РКП», АДК-СЦБ и др. Учитывая потенциал ОСРВ QNX, эта система может претендовать на роль одной из основных платформ для разработки микропроцессорных систем железнодорожной автоматики.
К настоящему времени системой оборудованы участки на полигоне ОАО «РЖД» протяженностью 2450 км.
Руководством ОАО «РЖД» принято решение об оборудовании системой «ДЦ-ЮГ с РКП» железнодорожных участков в рамках Правительственной программы реконструкции и строительства железнодорожных объектов Сочинской олимпиады к 2014 году.
Перспективы развития:
Коллектив разработчиков системы «ДЦ-ЮГ с РКП», в соответствии с планом стратегического развития ОАО «РЖД» до 2015 года, продолжает работу по совершенствованию существующей и созданию новой версии «ДЦ-ЮГ с РКП», предусматривающей применение спутниковой навигации Глонасс/GPS и переход на новую версию ОСРВ QNX 6.5, что обусловлено наличием в ней нового функционала, повышающего отказоустойчивость, высокого коэффициента готовности и поддержки ARM архитектуры, обеспечивающей пониженное энергопотребление. Использование спутниковых технологий предполагает программно-аппаратную интеграцию с навигационными системами, позволяющими достичь качественно новых показателей и функциональных возможностей «ДЦ-ЮГ с РКП».
|
|
